Control de un PaP con el driver A4988
Control de un PaP con el driver A4988
Control de un PaP con el driver A4988:
En este tutorial de Arduino, aprenderemos cómo controlar un motor paso a paso utilizando el A4988. Este driver es un circuito integrado de micro-pasos para controlar motores PaP bipolares que tiene un traductor incorporado para una fácil operación. Esto significa que podemos controlar el motor paso a paso con solo 2 pines de nuestro controlador, o uno para controlar la dirección de rotación y el otro para controlar los pasos.
Componentes.
- Arduino UNO Compatible Chip Atmega328 R3
- Modulo Driver para Motor (Paso a paso) Pololu A4988 (1182)
- Motor Paso a Paso NEMA 17 17HS3430 0.4A
- Mini Protoboard Adhesiva De 400 Puntos – 8.5cm X 5.5cm
- Cable USB tipo B (Arduino UNO).
- Jumpers M-H.
- IDE Arduino
Diferencias entre el A4988 y el DRV8825.
El DRV8825 es bastante similar al A4988 pero hay algunas diferencias clave:
- El DRV8825 ofrece 1/32 microstepping, mientras que el A4988 solo baja a 1/16 de paso. Resultados de micropasos más altos en una operación más suave y silenciosa, pero no siempre es necesaria.
- El potenciómetro de límite de corriente está en una ubicación diferente
- La relación entre el voltaje de referencia y el límite de corriente es diferente.
- El DRV8825 requiere una duración mínima de pulso STEP de 1.9 µs; el A4988 requiere un mínimo de 1 µs.
- El DRV8825 se puede utilizar con una fuente de alimentación de motor de mayor voltaje (45 V frente a 35 V). Esto significa que es menos susceptible al daño por picos de voltaje LC.
- El DRV8825 puede entregar un poco más de corriente que el A4988 sin ningún enfriamiento adicional.
Tenga en cuenta que el pinout del DRV8825 es exactamente el mismo que para el A4988, por lo que puede usarse como un reemplazo de reemplazo.

Calibración del driver.
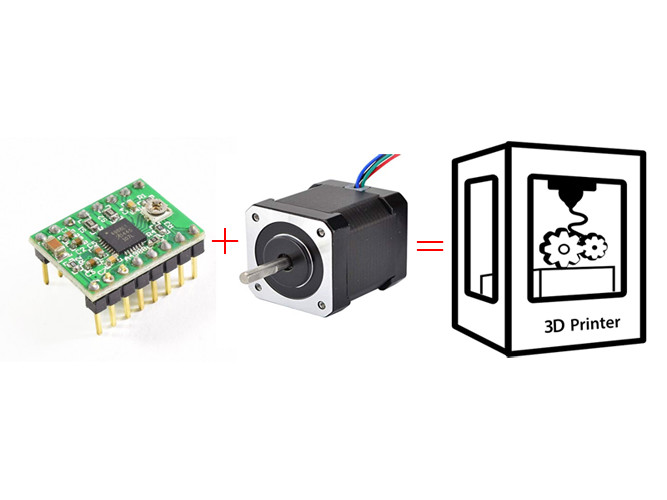
Antes de conectar el motor PaP al driver, es necesario verificar la corriente que le estamos suministrado, porque no todos los motores paso a paso manejan una misma corriente nominal, entonces es necesario variar la corriente que circula por el motor para que tenga más o menos torque; esta corriente se varia con un reostato incrustado en la tarjeta del driver, la podremos encontrar fácilmente como la cabeza de un tornillo. 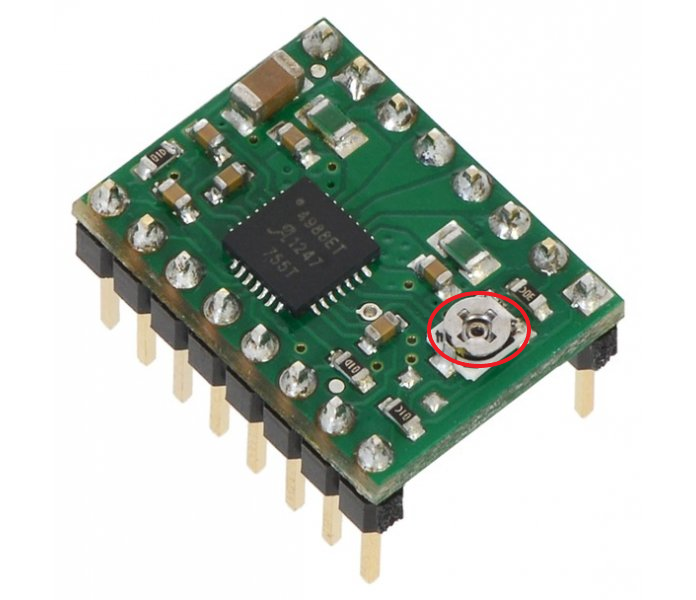 Mirando el driver desde las vista de la anterior imagen, al girar ese tornillo en sentido de las manecillas de reloj, disminuimos la corriente suministrada por los canales, y del mismo modo, girándolo en contra de las manecillas del reloj, aumentamos la corriente. Para medir la corriente actual del sensor, colocamos las puntas del multímetro de la siguiente manera:
Mirando el driver desde las vista de la anterior imagen, al girar ese tornillo en sentido de las manecillas de reloj, disminuimos la corriente suministrada por los canales, y del mismo modo, girándolo en contra de las manecillas del reloj, aumentamos la corriente. Para medir la corriente actual del sensor, colocamos las puntas del multímetro de la siguiente manera:
 La corriente que suministramos a los motores, calibraremos los motores a una corriente mínima del 60-70% de su corriente nominal. Por ejemplo, un motor de 1,7A de corriente nominal lo calibraremos a una corriente de 1-1,2A, un valor nada elevado y perfectamente tolerable por la mayoría de los Drivers disponibles.
La corriente que suministramos a los motores, calibraremos los motores a una corriente mínima del 60-70% de su corriente nominal. Por ejemplo, un motor de 1,7A de corriente nominal lo calibraremos a una corriente de 1-1,2A, un valor nada elevado y perfectamente tolerable por la mayoría de los Drivers disponibles.
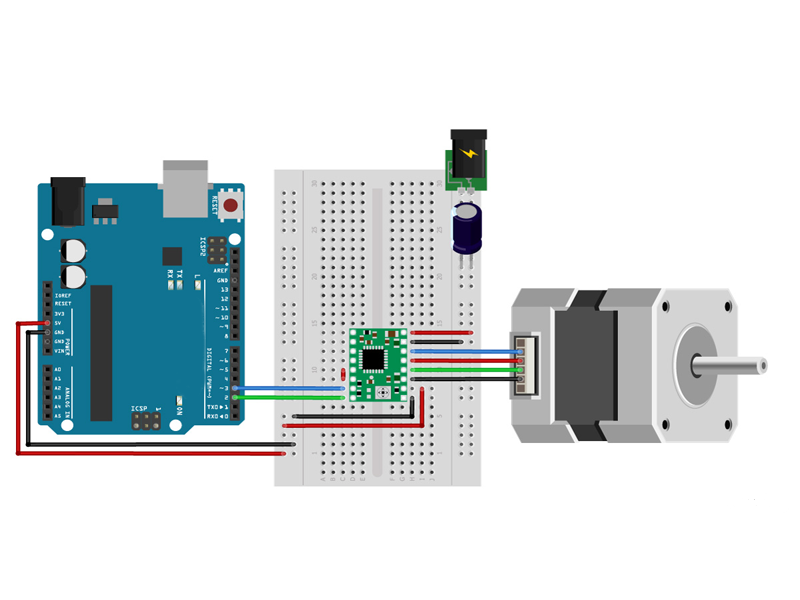
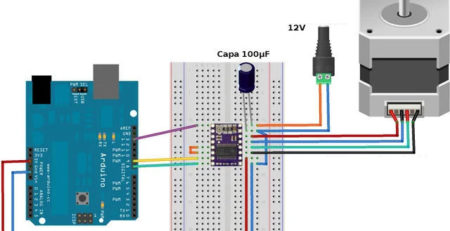
Esquema de montaje.
El siguiente esquema, es un montaje con el Arduino Uno y un PaP bipolar. Antes de conectar el driver al Arduino, verificar la alimentación externa del driver, ya que si esta mal conectada, podríamos quemar el driver o dañar algún periférico del controlador.
Ahora que ha conectado el controlador y ha establecido el límite actual, es hora de conectar el Arduino a la computadora y cargar un código. Puede cargar el siguiente código de ejemplo en su Arduino utilizando el IDE de Arduino . Para este ejemplo específico, no necesita instalar ninguna biblioteca.
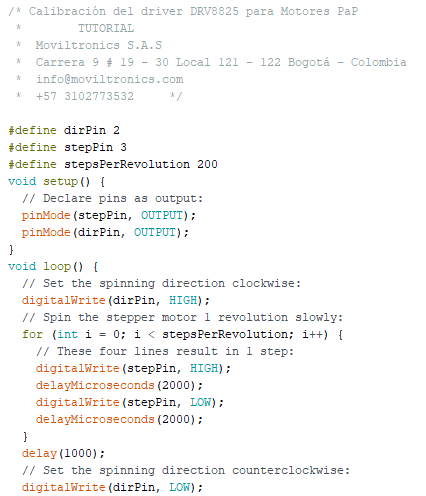
La función del código girar 5 revoluciones a alta velocidad y luego otras 5 a baja velocidad.
Espero les haya servido el tutorial, cualquier duda o inquietud en la caja de comentarios, gracias.

Deja una respuesta
Lo siento, debes estar conectado para publicar un comentario.