Calibración del driver DRV8825
Calibración del driver DRV8825
Calibración del driver DRV8825:
En primer lugar el driver DRV8825 es un controlador que simplifica el manejo de los motores paso a paso porque energiza la bobina que se necesita por cada pulso controlado desde el micro controlador, del mismo modo que lo hace un circuito integrado de puentes-H para el control de las bobinas, por lo que, el punte H es un interruptor hecho con transistores, que nos va a permitir el flujo de corriente para que de esta manera, le demos el sentido de giro a los motores que queramos manejar en comparación de conectarlo directamente a transistores pnp o npn.
Componentes
- Motor Paso A Paso Nema 23 STP-59D103 1.8 Grados 1.4 Amperios
- Arduino UNO Compatible Chip Atmega328 R3
- Cable USB tipo B (Arduino UNO).
- Mini Protoboard Adhesiva De 400 Puntos – 8.5cm X 5.5cm
- IDE Arduino.
- Modulo Driver para Motor PAP pololu DRV8825 (2133)
- Jumpers M-H.
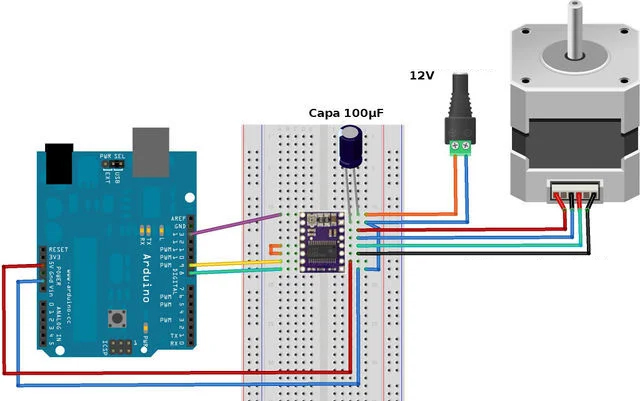
Esquema de montaje
En primer lugar, para conectar nuestro Driver al Arduino o microprocesador, es necesario tenerlo desconectado y revisar la orientación del controlador durante el montaje, porque podremos quemar el Driver o algún periférico del micro-controlador si conectamos de manera no adecuada, sobre todo si estamos manejando fuentes externas con un gran amperaje para soportar el consumo de corriente de los motores.

En segundo lugar, la conexión al Arduino será la siguiente, esta conexión puede variar debido a versiones diferentes del Arduino, es decir, revisar el Datasshet del Arduino que estés usando antes de realizar cualquier conexión.

Como ejemplo didáctico, el diagrama electrónico sería de la siguiente manera.
Una vez nosotros tengamos conectado el Driver con la fuente externa y a nuestro controlador, pasaremos a calibrar la corriente antes de conectar y programar los motores paso a paso, por lo tanto deberemos conectar la fuente externa al DRV8825.
Calibración de la corriente
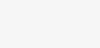
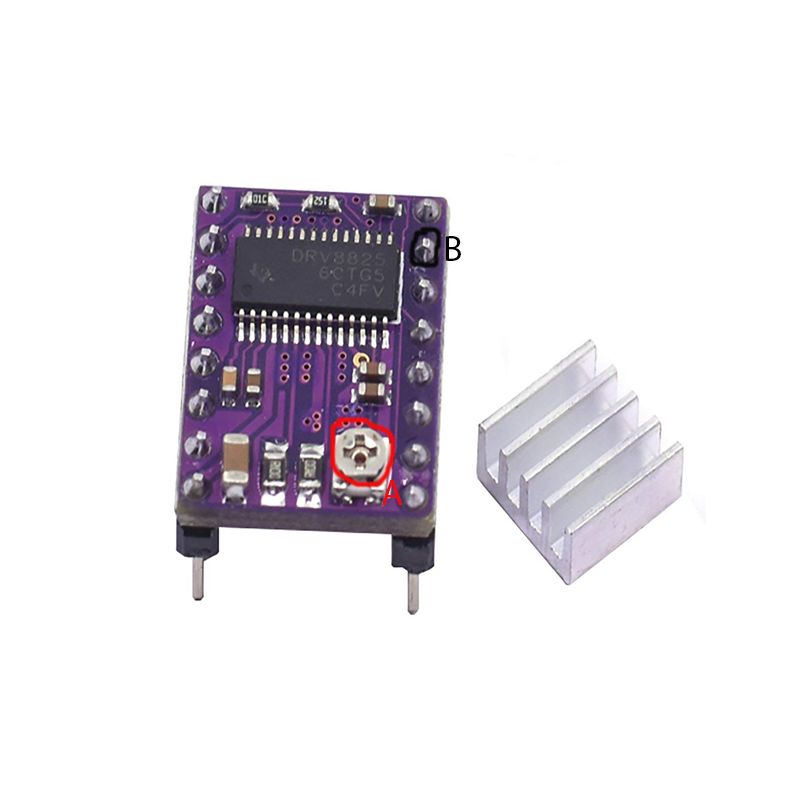
El DRV8825 tiene un reostato incrustado para la regulación de la corriente que le vamos a suministrar a nuestros motores, porque no todos los motores paso a paso manejan una misma corriente nominal, entonces es necesario variar la corriente que circula por el motor para que tenga más o menos torque.
Mirando el driver desde las vista de la anterior imagen, al girar ese tornillo en contra de las manecillas de reloj, disminuimos la corriente suministrada por los canales, y del mismo modo, girándolo en sentido de las manecillas del reloj, aumentamos la corriente. Para medir la corriente actual del sensor, colocamos la punta roja del multímetro en A, y la punta negra en B de la siguiente imagen:
La corriente que suministramos a los motores, calibraremos los motores a una corriente mínima del 60-70% de su corriente nominal. Por ejemplo, un motor de 1,7A de corriente nominal lo calibraremos a una corriente de 1-1,2A, un valor nada elevado y perfectamente tolerable por la mayoría de los Drivers disponibles.
Programación
En conclusión; aunque entender los pormenores del DRV8825 puede haber tenido su dificultad, las ventajas de su uso son claras y lo más importante, programar las salidas del driver para su control, lo cual es extremadamente sencillo, porque únicamente es definir los pines digitales como salidas y programar las ordenes de activación.
Simplemente tenemos que indicar mediante dos salidas digitales el instante en el que queremos que el motor avance un paso, y el sentido de giro. Sin embargo, la velocidad de giro se controla por el tiempo que dejamos transcurrir entre paso y paso.
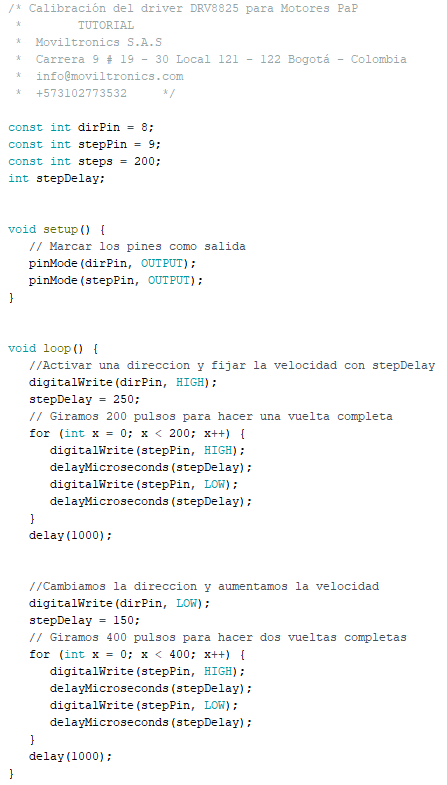
Como ejemplo, el siguiente código hace girar el motor paso a paso una revolución en un sentido, y de manera similar, dos revoluciones en sentido contrario a una velocidad ligeramente superior.
Código en Arduino
Disponible en https://github.com/Moviltronics/Moviltronics-S.A.S.git
———————————–//—————————–//—————————–//—————————

Deja una respuesta
Lo siento, debes estar conectado para publicar un comentario.