Movimiento de servomotor y arduino (Librería Servo)
TEMA: Giro de un motor servo SG90 de 0 a 90° y de 90° a 180° utilizando la librería Servo y arduino
COMPONENTES:
- Protoboard
- Tarjeta ARDUINO UNO
- Jumpers o cable UTP
- Servo SG90
INSTRUCCIONES
NOTA: las conexiones de cada servomotor varían (revisar manual).
- El cable naranja del servo va a una señal de PWM del arduino en este ejemplo utilizaremos el pin 9 de nuestra placa.
- El cable rojo es la alimentación a 5V que genera el arduino
- El cable café va a GND.
El servo motor permite hacer un giro de -90° a 90° también se puede contemplar como un giro de 180°.

CONEXIÓN FÍSICA
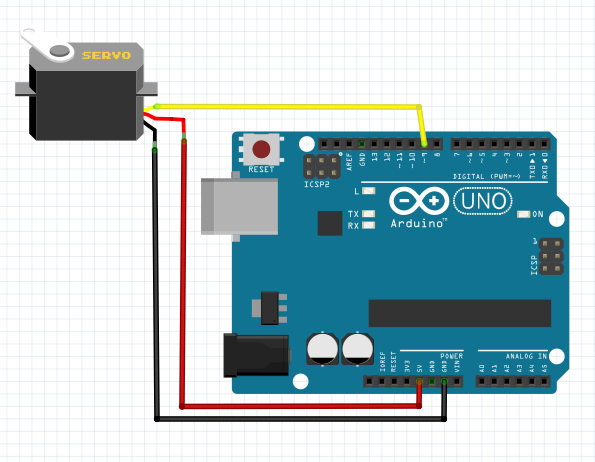
ESQUEMA ELÉCTRICO:

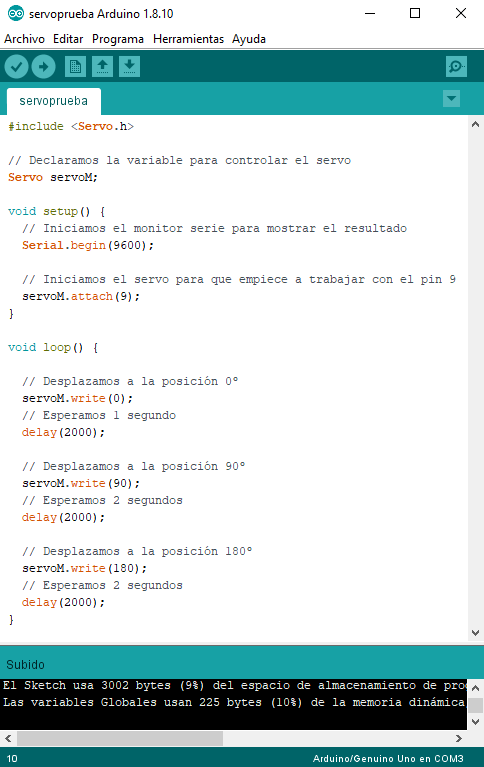
CÓDIGO:
- Vamos a incluir la librería servo en nuestro código
vamos al IDE → Programa → Incluir librería → Servo
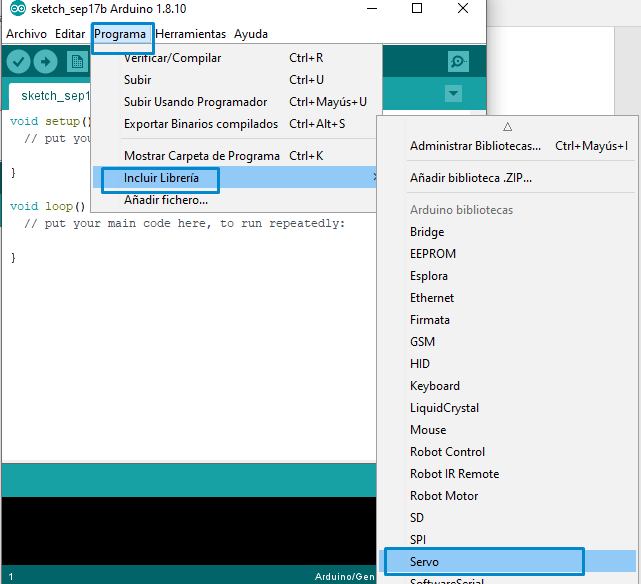
Al realizar el anterior paso se generará la siguiente línea de código

#include <Servo.h>
// Declaramos la variable para controlar el servo
Servo servoM;
void setup() {
// Iniciamos el monitor serie para mostrar el resultado
Serial.begin(9600);
// Iniciamos el servo para que empiece a trabajar con el pin 9
servoM.attach(9);
}
void loop() {
// Desplazamos a la posición 0º
servoM.write(0);
// Esperamos 2 segundos
delay(2000);
// Desplazamos a la posición 90º
servoM.write(90);
// Esperamos 2 segundos
delay(2000);
// Desplazamos a la posición 180º
servoM.write(180);
// Esperamos 2 segundo
delay(2000);
}
Realizamos la comprobación de errores, Seleccionando Verificar.
![]()
Si al verificar el código no se presenta ningún error procedemos a realizar la compilación y cargarlo en la placa arduino.![]()



Deja una respuesta
Lo siento, debes estar conectado para publicar un comentario.